Top 3 Drone LiDAR Project Pitfalls (and How to Avoid Them)
Jan 27, 2023
Do you want to make sure your LiDAR project goes well? Of course you do! Over the course of consulting with drone LiDAR clients, we've noticed three major project pitfalls DSPs make. In this article, we'll explore these mistakes that are commonly made in drone LiDAR surveying and provide guidance on how to avoid them.

Mistake #1: Not Properly Calibrating the LiDAR Sensor
One of the most common mistakes in LiDAR surveying is needing to calibrate the LiDAR sensor properly. The LiDAR sensor on a drone is a complex piece of equipment that requires proper calibration. The sensor must be calibrated for the drone's position and attitude (i.e., orientation) to ensure that the data it collects is accurate.
If the sensor is not calibrated correctly, it can lead to inaccuracies in the data collected, which can compromise the entire survey. Inaccuracies can occur if the sensor is not aligned correctly, if the settings are not adjusted properly, or if the sensor is not functioning correctly.
To avoid this mistake, it is crucial to calibrate the LiDAR sensor before each flight. This includes checking the sensor's alignment, adjusting its settings, and performing a test flight to ensure that the data it collects is accurate. Additionally, it is essential to regularly maintain and update the sensor to ensure it is working correctly. This can include cleaning the sensor, checking for damage, and updating the firmware.
*Related: *What are the components of a LiDAR sensor?
Mistake #2: Not Using the Correct Flight Plan
Another common mistake we see in LiDAR surveying is not using the proper flight plan. The flight plan for a drone LiDAR survey is crucial for data quality, as it determines how the drone will collect data and cover the survey area. If the flight plan is not designed correctly, the data can be incomplete or inaccurate, which can compromise the entire survey.
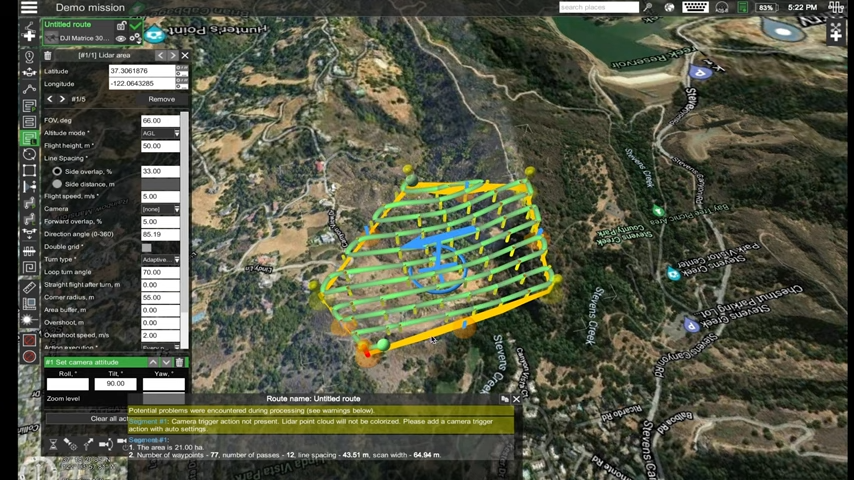
To avoid this, it is important to use a flight plan designed explicitly for LiDAR surveying. This usually means flying in a grid pattern, keeping the drone at a consistent altitude and speed, and taking multiple passes over the survey area. This allows the LiDAR sensor to collect data from different angles and ensure complete coverage of the survey area.
It is also a good idea to use flight planning software to monitor the drone's position and status. This allows you to make adjustments to the flight plan as needed to ensure that the data collected is accurate.
*Related: *LiDAR Mission Planning Fundamentals
Mistake #3: Not Post-Processing the Data Properly
Another common mistake in LiDAR surveying is not correctly post-processing the LiDAR data. The LiDAR data collected by the drone must be processed and analyzed to help create maps and models. If the data is not post-processed correctly, it can lead to inaccuracies in the final results and compromise the entire survey.
We can't stress this enough — surveyors have to use software that is specifically designed for post-processing LiDAR data. This software will typically include tools for filtering, classifying, and analyzing the data. It is also important to have a team of experienced professionals trained in LiDAR data post-processing to ensure that the data is processed correctly.

ROCK Cloud post-processing software does almost all the work for you, producing high-accuracy, survey-grade deliverables. Our support team provides live support during U.S. business hours, and we quality-check every project before sending you results. ROCK Cloud produces deliverables from any LiDAR file, including orthomosaics and images.
If you haven't tried ROCK Cloud, sign up for a free 14-day trial here.
By avoiding these three common drone LiDAR pitfalls, your projects will be more successful, your data will be more accurate, and your clients will be happy. Meet with the ROCK Robotic sales team to explore ROCK LiDAR hardware and software today.
Visit rockrobotic.com to learn more about our survey-grade LiDAR hardware and processing software.