Improving Accuracy of DJI Zenmuse L1 with ROCK Cloud 3D LiDAR Data Processing Software
May 11, 2022

Drone LiDAR Accuracy
Aerial Drone LiDAR has never been more accessible than now. A new generation of LiDAR hardware has hit the market and spans a large range of both price and quality. This puts even more pressure on the post-processing workflow to extract the good data from the bad. ROCK Robotic developed the ROCK Cloud software to answer this call for the growing community of 3D Point Cloud users. Boasting a large array of toolsets, the ROCK Cloud can also improve data by reducing the noise in entry level LiDAR systems. In this article we specifically discuss the new DJI Zenmuse L1 LiDAR, but the same processes apply to all LiDAR data in the ROCK Cloud. Read on to discover how the ROCK Cloud optimizes fuzzy datasets to improve your final deliverable accuracy.
DJI Zenmuse L1

DJI released the Zenmuse L1 LiDAR system in 2021. The LiDAR system is compact, inexpensive, and is carried by the DJI M300 drone system. The L1 brings a new idea for form factor and simplicity for 3D point cloud data acquisition. However, the data produced by the L1 can oftentimes be very “fuzzy” measuring from 10 cm to even up to 50 cm. Several factors contribute to the final point cloud being this fuzzy, but the main culprit is the IMU. So what can be done? Let's discuss the ROCK Cloud, and what we put together to help improve the accuracy of the L1 system.
ROCK Cloud
The ROCK Cloud was developed by ROCK Robotic with a completely new take on LiDAR processing. The tool combines secure backed up storage, visualization, analysis, and sharing functionality into 1 cloud platform. With the ROCK Marketplace, users have an affordable way to quickly get survey grade deliverables from their raw LiDAR data. ROCK helps all LiDAR users get access to the best deliverables no matter your experience level.
When a user uploads DJI L1 data and orders the ROCK Surveyor package, a series of processes are initiated. The end user will see their data and a final deliverable. But what they can't see is the magic that ROCK has put together to make those final deliverables so appealing.
ROCK Surveyor & ROCK A.I.
ROCK Surveyor is our 1-click deliverable engine to produce topographic surfaces. The deliverables include a classified LiDAR dataset, contours, topographic surfaces, and an accuracy report. The Surveyor engine is powered by ROCK A.I. and the ROCK QC/QA team.
The internal process of ROCK uses to generate these deliverables is what sets apart a ROCK deliverable from any other software. This is also what enables the improved accuracy from DJI L1 data.
How It Works
First, the ROCK A.I. engine finds the bare earth points and removes all other obstructions. This includes trees, vegetation, cars, buildings, signs, etc. Once the ROCK A.I. finds the bare earth, the engine looks for the best representative points. These points fall in a Gaussian distribution about the fuzzy data. Now that it has stripped down the data and found the points that best represent the ground, a surface is generated with contours. These surfaces include TIN models and DEMs. This final deliverable allows the accuracy to be effectively assessed. What we find is the random noise of the original point cloud can be very high, often over 20cm! With the ROCK Cloud, this error can be significantly lower. The specific improvement rate varies from flight to flight, but we observe a systematically lower error rate on deliverables from ROCK surveyor when compared to the original noisy point cloud.
ROCK Surveyor - Contours
The Results
Oftentimes, this will increase the accuracy of the RAW point cloud from 20+ cm down to 5 cm. In the example below (Fig. 1), there is a cross section of an airport runway captured with the DJI L1. The thickness of the fuzz is roughly 0.4 ft (12 cm). After running ROCK Surveyor on the dataset, we compared it to 178 GCPs that were captured across the site. The error with respect to the ROCK Cloud Surveyor deliverable is reduced to 0.193 ft (5.8 cm), a decrease in error of over 50%!

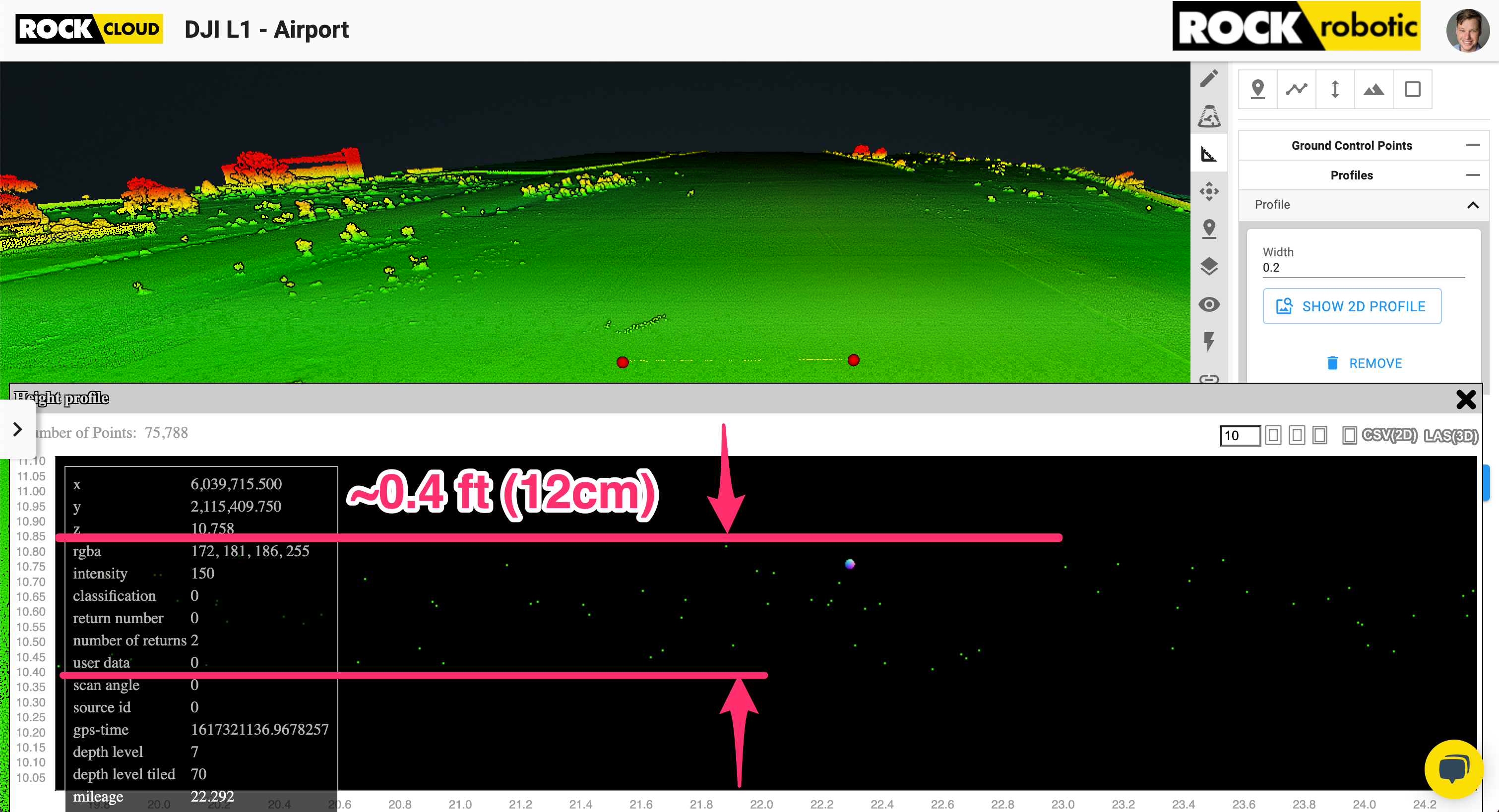
Fig. 1 - DJI L1 - Cross Section
Other Issues with the Zenmuse L1
The "fuzz" isn’t the only issue commonly found in these datasets from the L1 LiDAR system. In addition to the high frequency noise that affects each point and causes this fuzz, there is also a long-term measurement error that can occur throughout the dataset, causing undulations up and down across large regions. This noise is extremely difficult to remove. Users who experience this noise will see their ground control points above the surface in some locations and below the surface in other locations, and no amount of moving the dataset will remove this noise.
As you can see, the ROCK Cloud makes a significant difference in the overall quality of DJI L1 datasets and their resulting deliverables. With a World-Class Support Team to help guide you through the ROCK Cloud and the ROCK Development Team that keeps improving your ability to manage your data, the ROCK Cloud is the obvious solution!
To learn more about the undulations, check out this video.